RoboticBoat.uk
Home
UNO
Mega
Pico-W
Teensy3.6
Teensy4.0
Teensy4.1
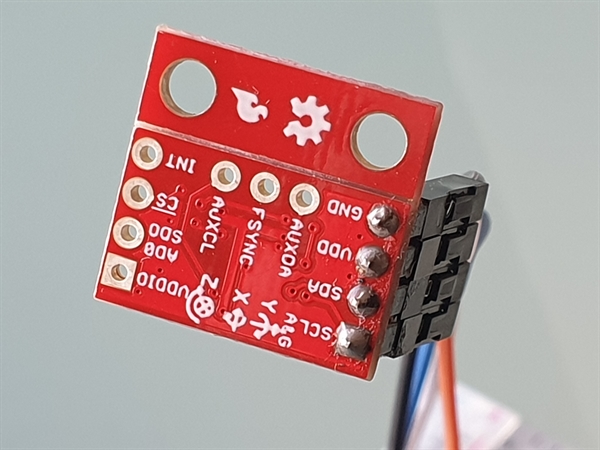
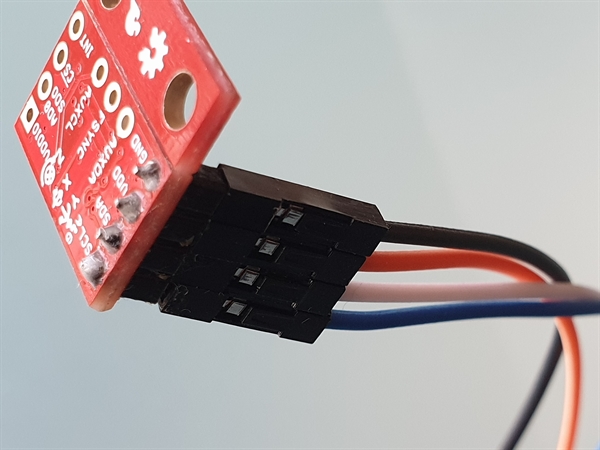
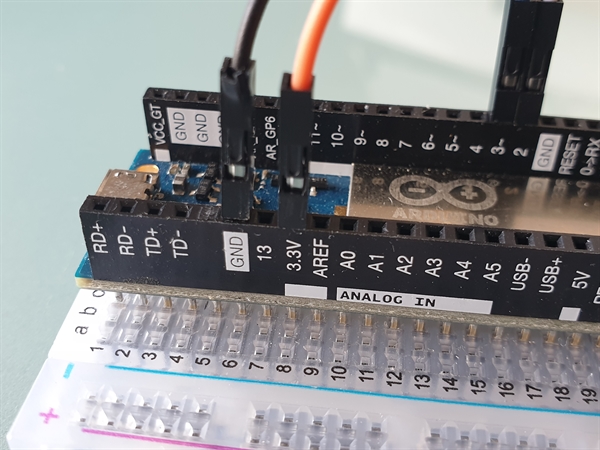
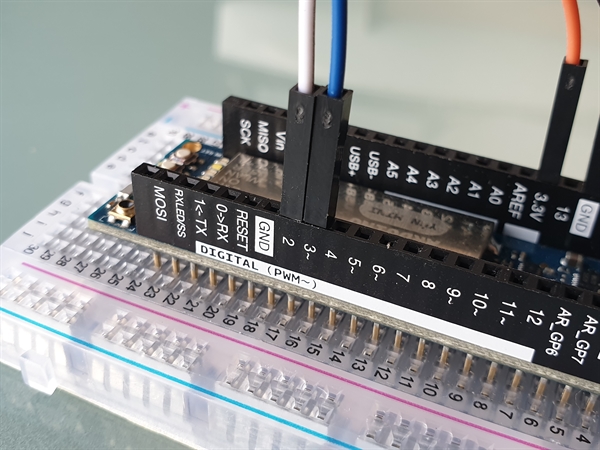
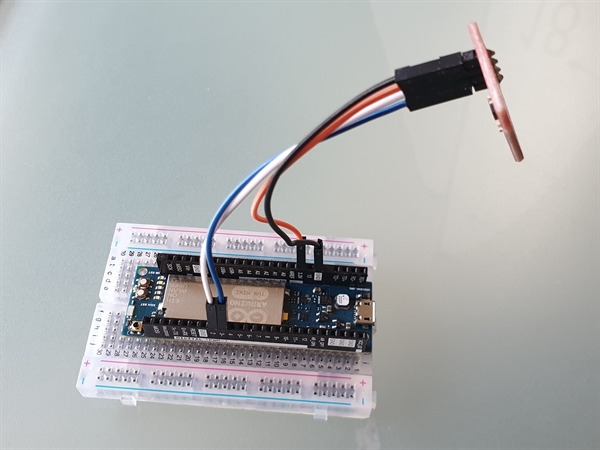
Arduino Yun Mini + MPU9250
Photo
Sketch