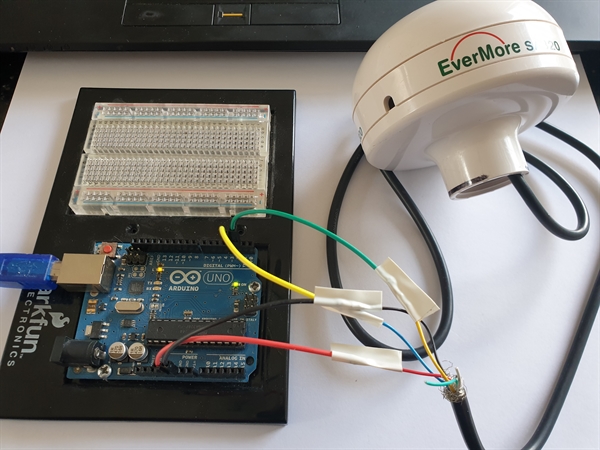
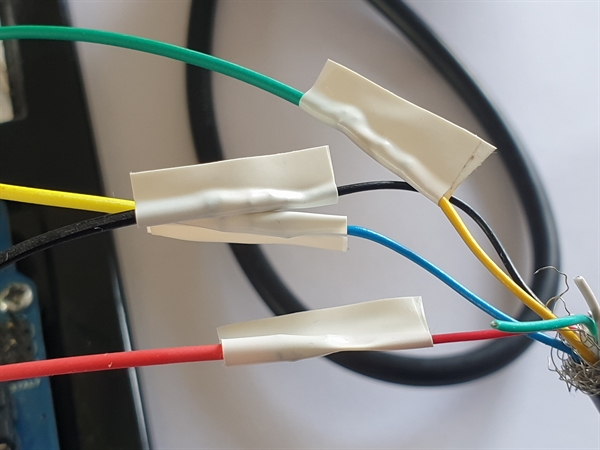
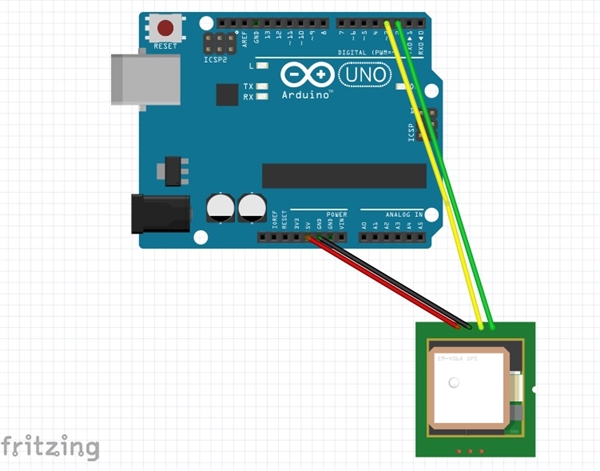
Arduino Uno + EverMore SA320 GPS
This might have been the first GPS module I have bought. It could track a massive 12 parallel channels. It had benefits of having a waterproof case and UV-resistant. It's Serial speed was 4800 baud rate. All said, tracking more satelites does not a guarantee of being more accurate.
Video
Please click thumbnail image to start the video


Photo