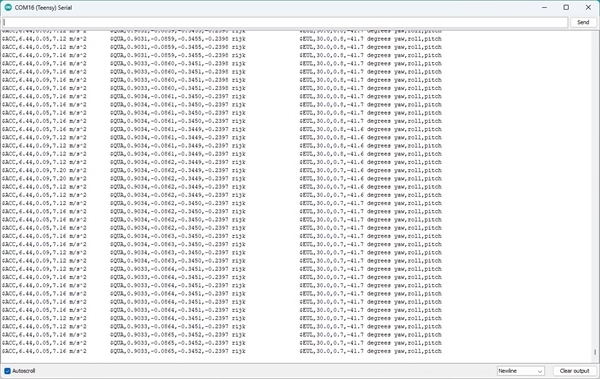
Teensy 4.0 + Quaternion + Euler angles
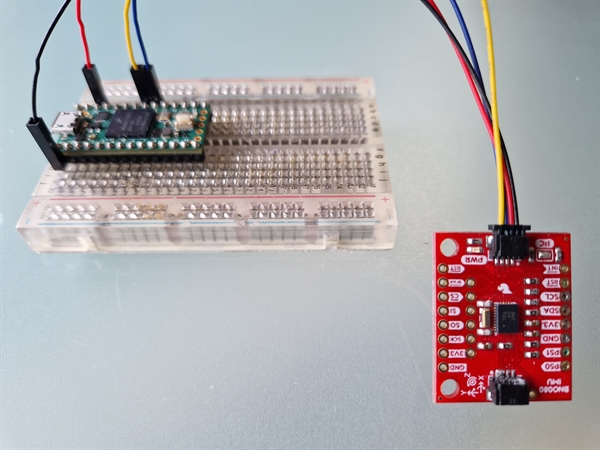
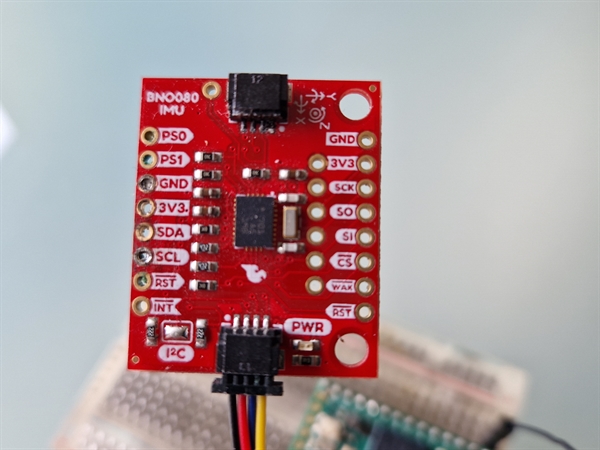
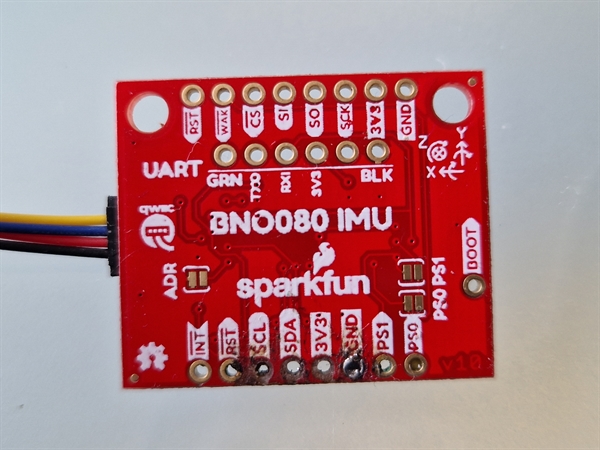
SparkFun VR IMU Breakout - BNO080. Based on a Bosch BNO080 with a 32-bit ARM Cortex MO+ processor. Readings of acceleration, gyroscope and magnetometer.
Please note this script will not work with the newer BNO086.
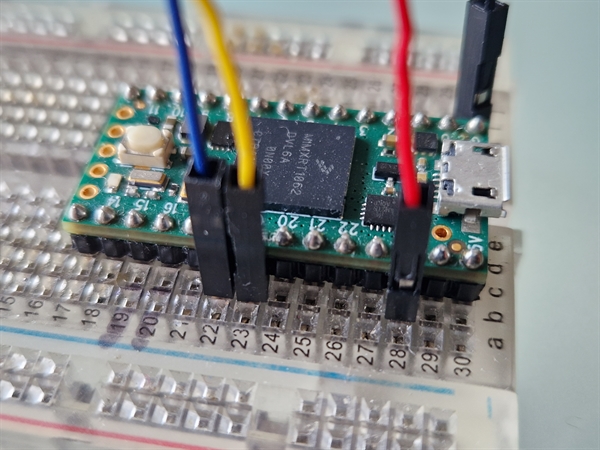
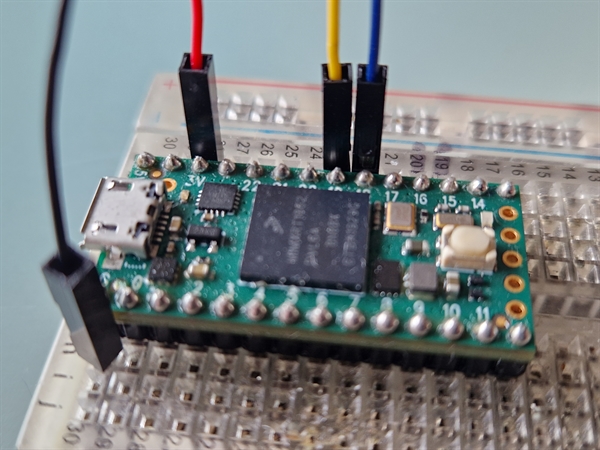
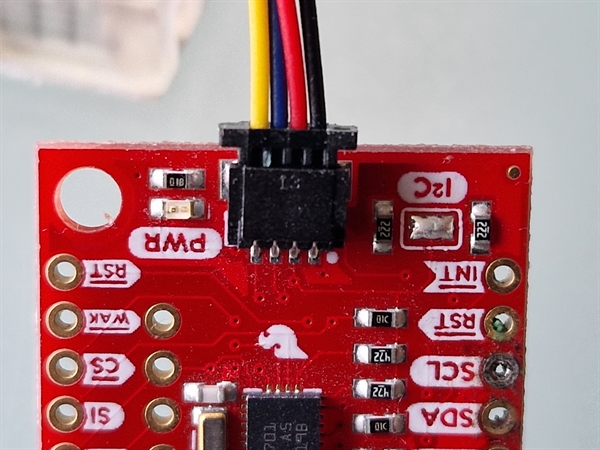
Connections
| Description | Colour | Teensy 4.0 | BNO080 module |
|---|---|---|---|
| Power 3v | Red | 3.3v | Qwiic connector |
| Ground | Brown | GND | Qwiic connector |
| i2c Data | Blue | 18 | Qwiic connector |
| i2c Clock | Yellow | 19 | Qwiic connector |

Photo