RoboticBoat.uk
Home
UNO
Mega
Pico-W
Teensy3.6
Teensy4.0
Teensy4.1
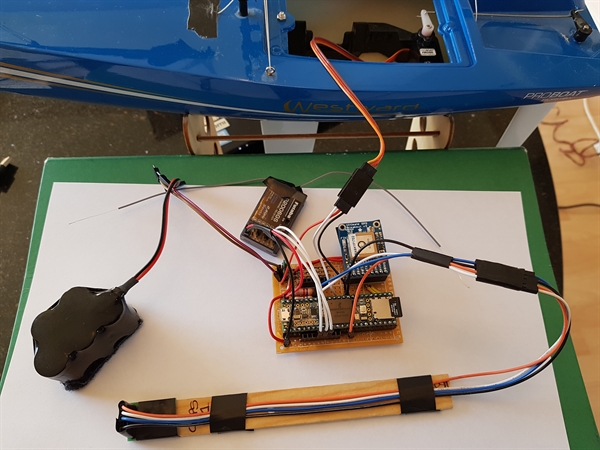
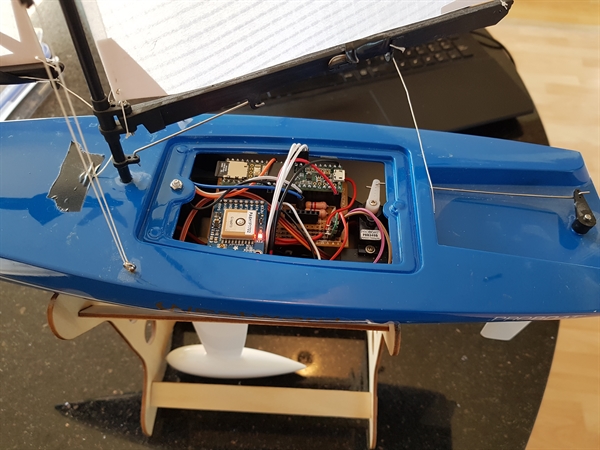
Teensy 3.6 + Westward 1
Video
Please click thumbnail image to start the video
Photo
Sketch