Teensy 3.6 + Radio Control
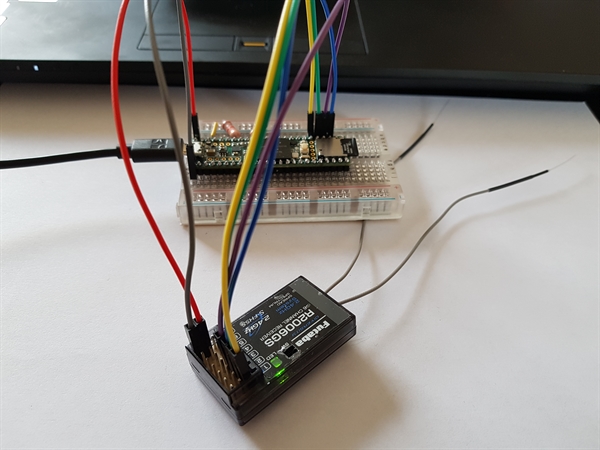
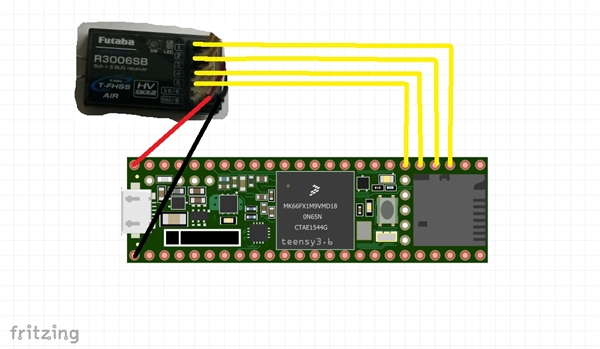
The Radio Control receiver was the main reason for me to investigate microcontrollers. I needed a way to read the signal that I was transmitting from a Radio Control transmitter. I discovered about PWM signals and that they could be read by microcontrollers. I started small with the Arduino Uno, but have branched out since. Reading a radio control receiver is useful as I can take control of the robot if it is heading into danger.
Video
Please click thumbnail image to start the video

Photo