RoboticBoat.uk
Home
UNO
Mega
Pico-W
Teensy3.6
Teensy4.0
Teensy4.1
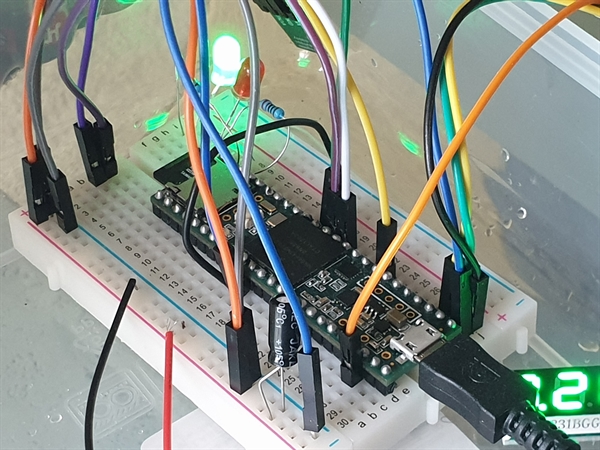
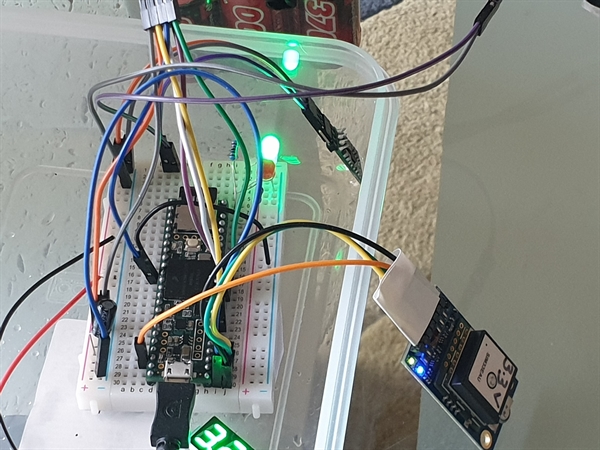
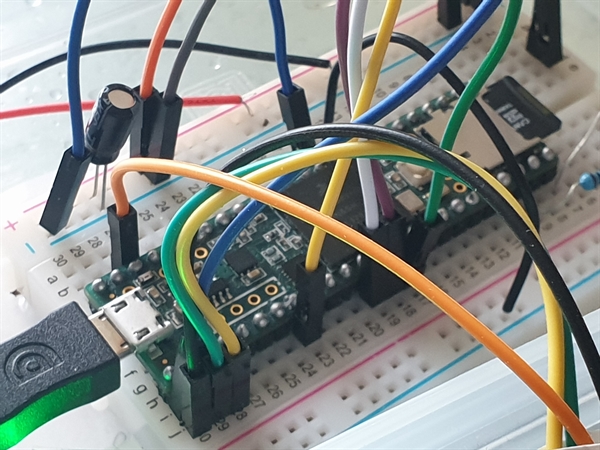
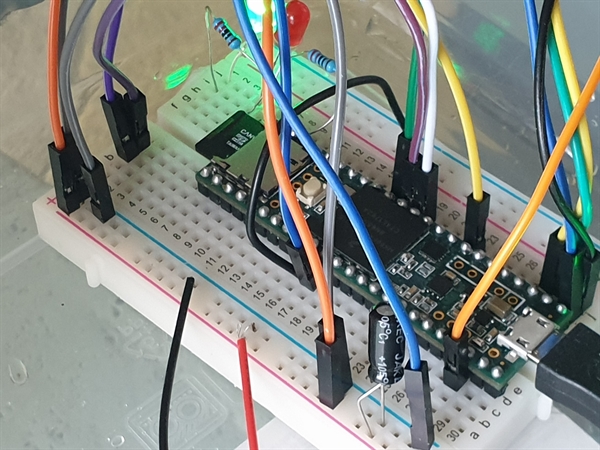
Teensy 3.6 + RF24L01
nRF24L01+PA+LNA Antenna Wireless Transceiver RF Transceiver Module. The 2.4GHz band is used.
Photo
Sketch