RoboticBoat.uk
Home
UNO
Mega
Pico-W
Teensy3.6
Teensy4.0
Teensy4.1
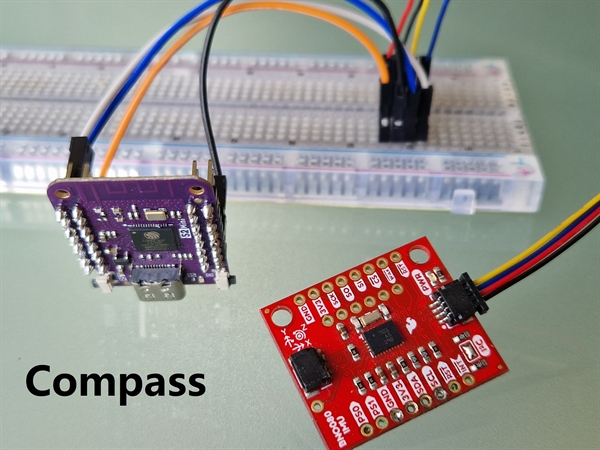
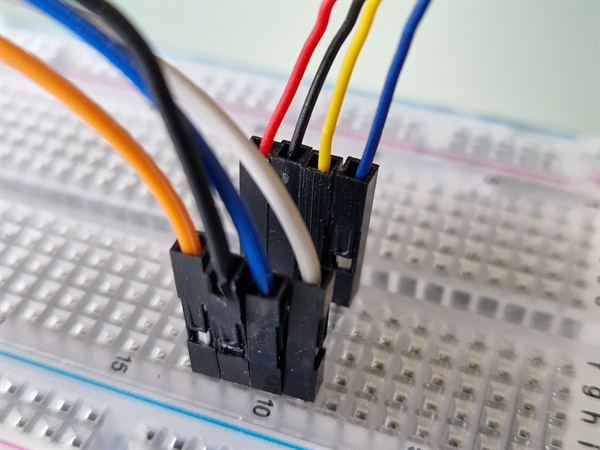
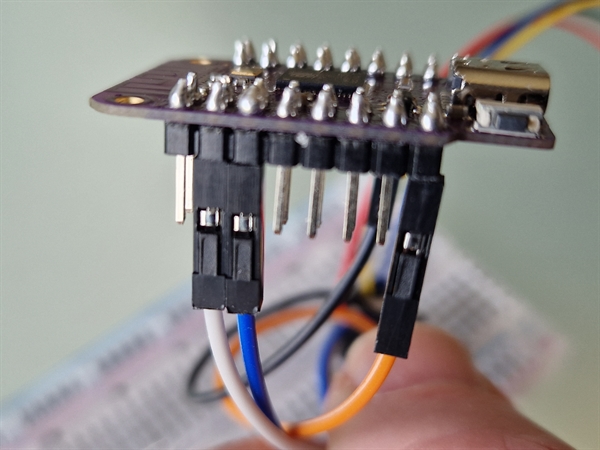
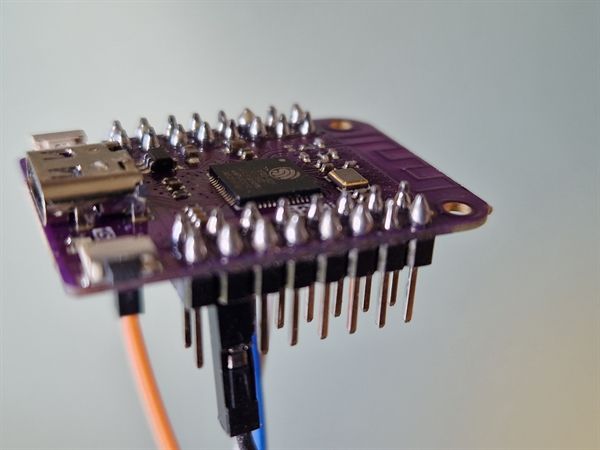
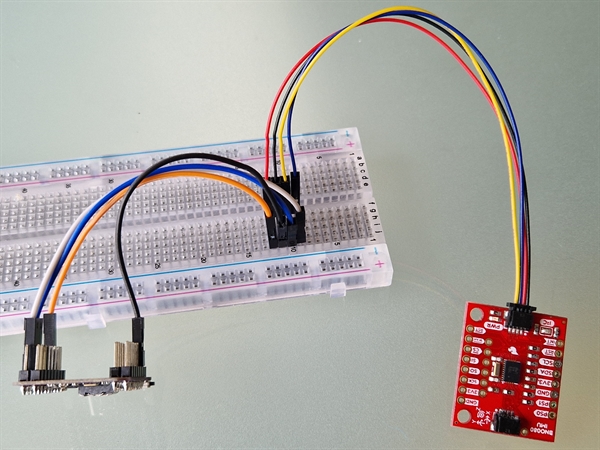
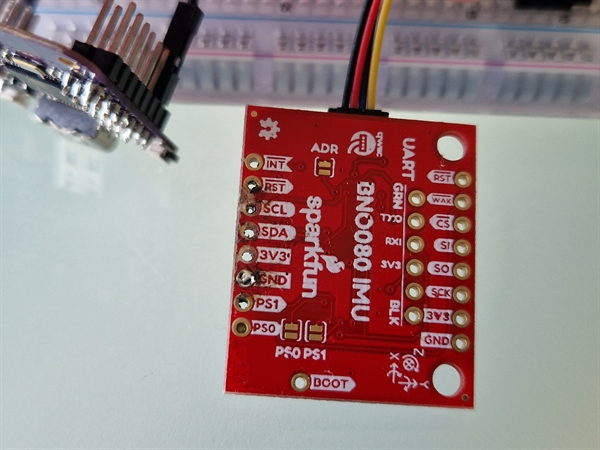
Lolin S2 Mini & Sparkfun BNO080
Photo
Sketch