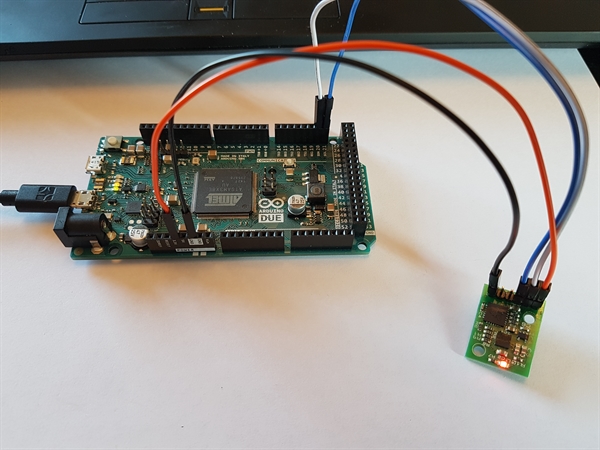
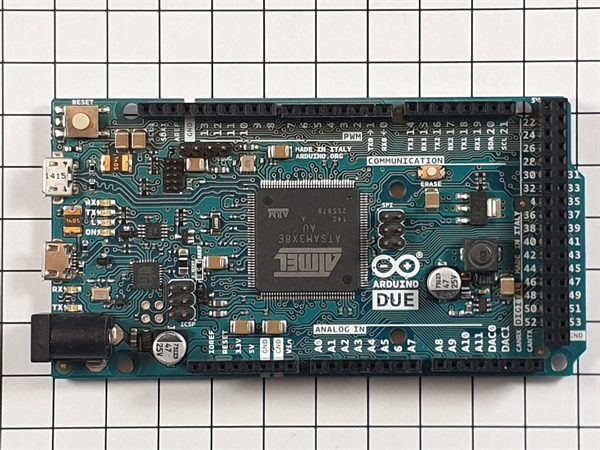
Arduino Due + CMPS11 compass
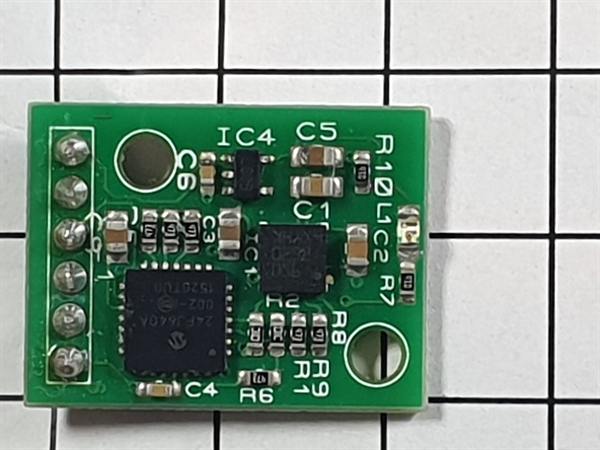
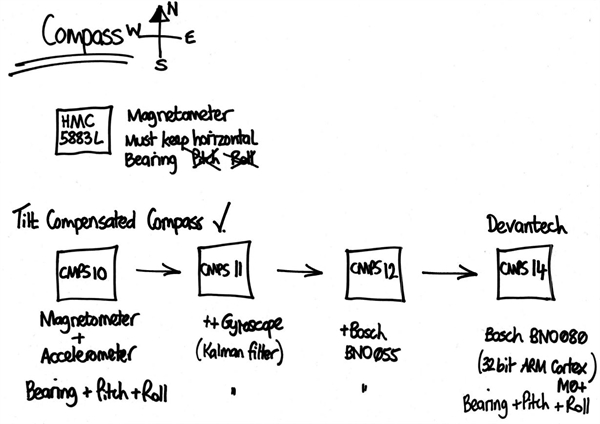
It is pretty essential to have a tilt compensated compass module on a boat that heels. The CMPS11 compass is an early example which met this requirement. Also noticed the module requires 3.6v (>3.3v) input. Compared to the CMPS10 the module adds a gyroscope. This enables a Kalman filter to combine the gyro and accelerometer to remove errors caused by tilting.
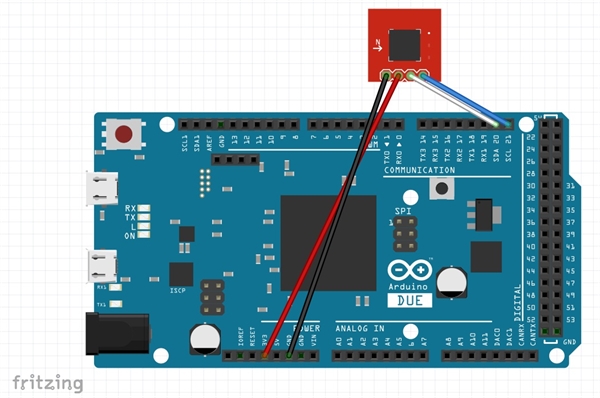
Connections
| Description | Colour | Arduino Due | CMPS11 compass |
|---|---|---|---|
| Power 3v | Orange | 3.3v | 3.6v - 5v |
| Ground | Black | GND | GND |
| i2c Data | White | 20 | Second from top |
| i2c Clock | Blue | 21 | Third from top |
Video
Please click thumbnail image to start the video


Photo